Autonomer Heuschwader
Dieses aktuelle Projekt ist in drei Teilprojekte gegliedert, an denen unterschiedliche Kleingruppen arbeiten.
- Simulation zur Optimierung der Flächenleistung
- Entwurf einer optimierten
mechatronischen Schwaderharke
(3D-Konstruktion) - Autonome Steuerung
einer mechatronischen Schwaderharke
Simulation zur Optimierung der Flächenleistung
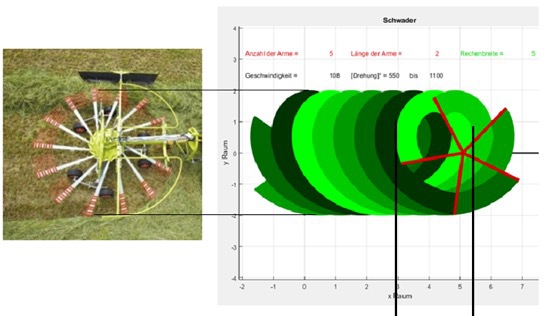
Unser Teilprojekt befasst sich mit der Optimierung der Flächenleistung eines autonomen Heuschwaders, der in einem großen Gesamtprojekt entwickelt wird. Wir wollten herausfinden, wie wir eine Fläche vollständig, aber nicht unnötig oft bearbeiten können. Schnell stellte sich heraus, dass aufgrund der großen Anzahl der Parameter und deren veränderbaren Auswirkungen keine einfache mathematische Beschreibung möglich ist. Zur Lösungsfindung haben wir uns daher für die rechnergestützte Simulierung entschieden. In Abhängigkeit von der Anzahl der eingesetzten Arme, Anzahl und Breite der Rechen und dem Verhältnis zwischen Linear- und Drehgeschwindigkeit des Mittelpunktes entwickelten wir mit Hilfe der Programme MatLab/Octave ein Simulationsprogramm, das diese veränderbaren Parameter berücksichtigt. So konnten wir eine vollständige Optimierung erreichen.
Janis Schönegg und Anita Henkel erhielten für dieses Projekt beim Wettbewerb "Schüler experimentieren" 2020 in Friedrichshafen den Regionalsieg auf dem Gebiet Mathematik. Eine Teilnahme am Landeswettbewerb Baden-Württemberg war nicht möglich, da dieser aufgrund von Corona abgesagt wurde.
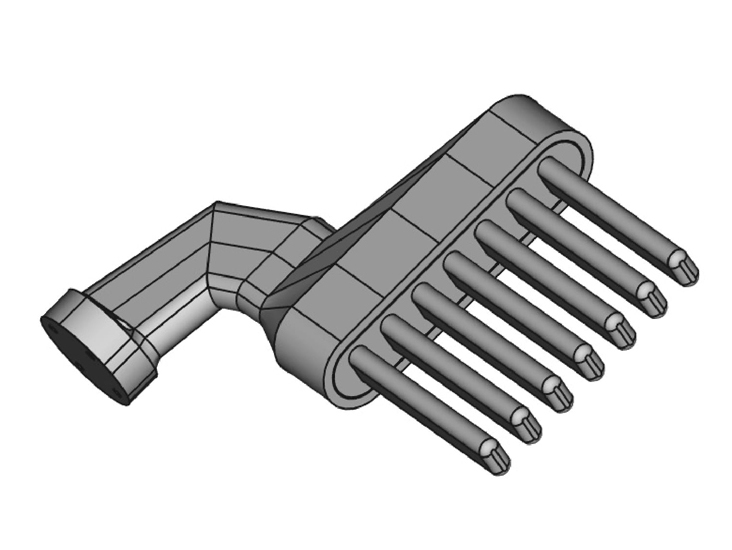
Entwurf einer optimierten
mechatronische Schwaderharke
(3D-Konstruktion)
Ein grundsätzliches Problem bim Heuschwader ist die Futterverschmutzung durch Erde, die entweder aus der Grasnarbe gerissen oder durch Maulwurfshügel in den Schwader gezogen wird. Durch zu starkem Kontakt der Zinken mit der Grasnarbe besteht außerdem die Gefahr, dass Teile der Zinken beschädigt werden, was im schlimmsten Fall zum Stopp der Maschine führen kann. Andererseits dürfen die Zinken beim Heuwenden auch nicht zu hoch ansetzen, denn dann würde das Erntegut nicht vollständg aufgenommen werden.
Unser Teilprojekt hat die Aufgabe, einen Lösungsansatz für eine optimierte Arbeitsweise der mechanischen Harke unter Berücksichtigung von Bodenunebenheiten zu suchen. Unsere Harke sollte separat in
einem sonst statischen System angesteuert werden können. Durch entsprechende Negung der Rechen soll unsere Harke Ungleichmäßigkeiten in einem Gelände ausgleichen und einen optimalen Arbeitsablauf
garantieren.
Die Arbeitsweise der Harke simulieren wir am Rechner mit den Programmen MatLab/Octave. Für unser Demonstrationsmodell stellen wir viele Teile individuell in FreeCad und im 3D-Druckverfahren her. Die
Simulation eines Gyro-Sensors erfolgt mit Hilfe von Fischer-Technik.

Autonome Steuerung
einer mechatronischen Schwaderharke
die das geharkte Heu dann in eine Reihe bringt.
Um dies zu realisieren wird zunächst das Feld und die Harken simuliert und damit die Bewegung der einzelnen Harken berechnet und schlussendlich auch realisiert. Die einzelnen Harken werden je über einen Servo-Motor angesteuert, um immer zu wissen, wo die Harke zum aktuellen Zeitpunkt steht, da dieser immer Rückmeldung gibt. Ein Abbrechen der Zinken wird dadurch realisiert, dass diese aus flexiblem PLA gedruckt werden und nicht komplett steif sind.
Sämtliche Teile der Harke, bis auf den Servo-Motor und die Schrauben, wurden im Freeware Programm "FreeCad" erstellt und anschließend mit einem 3D-Drucker ausgedruckt.